Roboterarm
Um im Vorgriff auf die ab nächstem Jahr am MGF eingerichtete Junior-Ingenieur-Akademie eines der Projekte, die wir in Zusammenarbeit mit dem FabLab Bayreuth durchführen wollen, auszuprobieren, haben wir einen ersten Prototypen eines servogesteuerten 4-Achsen Roboterarms gebaut.
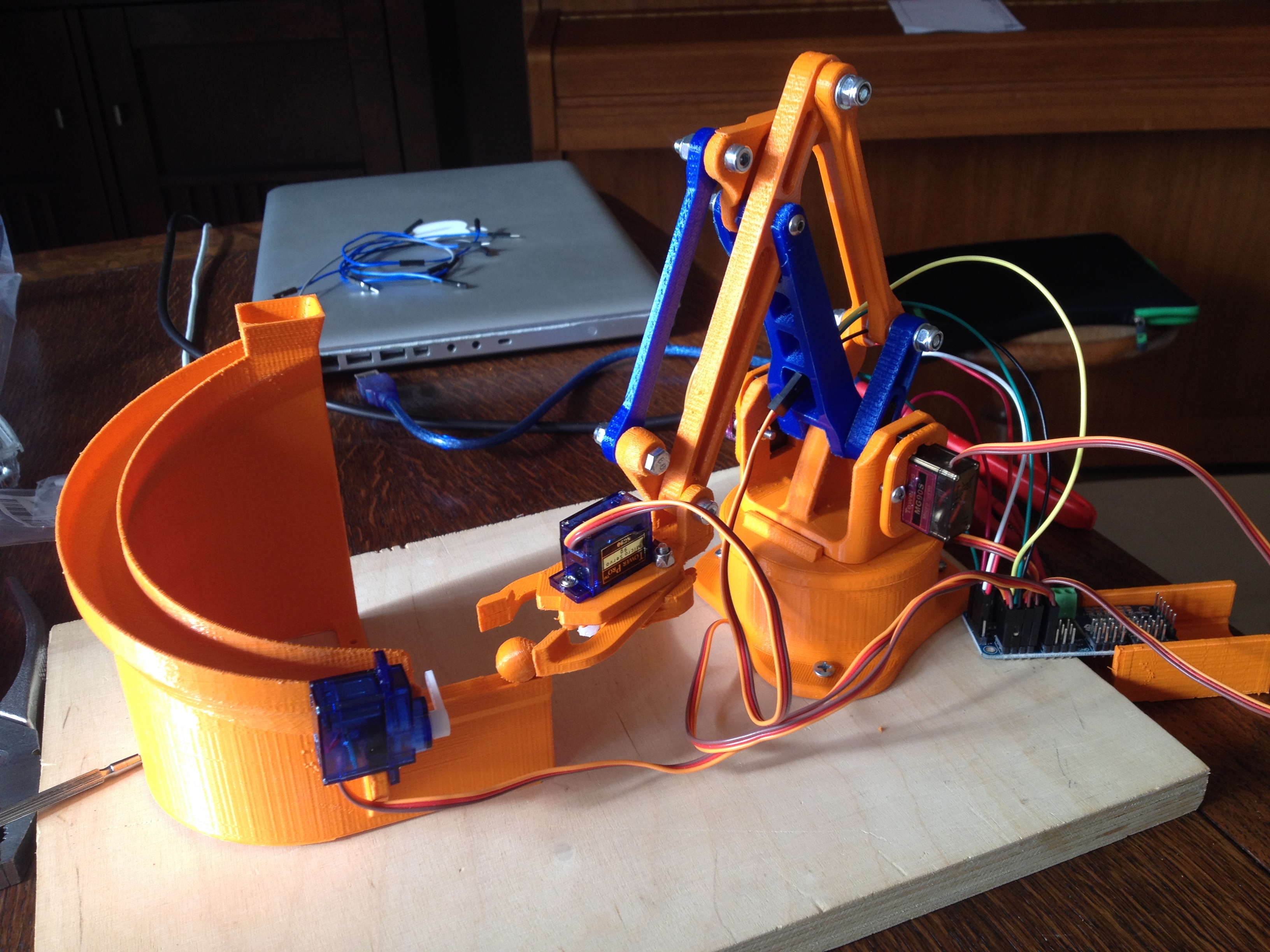
Grundlage war der EezybotARM von daGHIZmo, für den es auf Thingiverse die Druckdateien für die Base, die Ausleger und den Greifmechanismus gibt sowie ein Instructables mit der Aufbauanleitung.
Nachdem die benötigten Teile gedruckt, die Servomotoren bestellt und geliefert und die nötigen Kleinteile wie Schrauben, Beilagscheiben, Muttern und ein Messingrohr besorgt waren, konnte es an den Zusammenbau gehen. Hier und da musste auf Grund des beim Druck leicht geschrumpften Materials die ein oder andere Schraubendurchführung vorsichtig aufgefeilt werden.
An Servomotoren verbauten wir zwei SG90 mit Kunststoffgetriebe für den Greifer und die Link-Rechts-Ansteuerung. Für die Auf-Ab- und Vor-Zurück-Bewegung kamen zwei MG90S mit Metallgetriebe zum Einsatz.
Zur Ansteuerung der Servos benutzen wir einen 16-bit PWM-Motortreiber PCA9685 von SunFounder, mit dessen Hilfe die Servos über I2C anzusprechen sind und wir uns somit viele Ports am Steuer-Arduino sparen konnten.
Die ersten Funktionstests verliefen vielversprechend, als jedoch alles Servos zusammen agieren sollten, vollführten die Servos nur völlig unkoordiniert erscheinende, hektisch ruckelnde Bewegungen. Es dauerte einige Zeit bis die Schuldigen ausfindig gemacht werden konnten: die beiden Schräubchen, mit denen die Servoausleger auf die beiden gegenüberliegenden MG90S-Motoren geschraubt waren, verhakten sich an der zentralen Metallachse des Roboters und sorgten so für energische gegeneinander arbeitende Versuche der beiden Motoren, ihre von ihnen jeweils verlangte Endposition zu erreichen. Nach dem Entfernen der beiden Schräubchen lief der Roboterarm dann wie gewünscht.
Als kleine Aufgabe bekam der Roboterarm eine kleine Kugel am Ende einer Kugelbahn aufzunehmen und ans obere Ende der Bahn zu befördern. Hierbei stoppt ein fünfter Servo die Kugel kurz vor dem Ende der Bahn und gibt sie für ein langsames Rollen zur Entnahmestelle erst wieder frei, wenn der Greifer die Ausgangsposition wieder erreicht hat.
Die Positionierung des Greifers geschah nach Versuch und Irrtum, da die gegenseitigen Einflüsse der unterschiedlichen Gelenke auf die Position des Greifers noch nicht mathematisch abgebildet wurden. Aber das wäre ja eine Idee für die Fortführung des Projektes.
Zu bewundern gibt es unseren Roboterarm das erste Mal beim Arduino-Day 2017 im FabLab Bayreuth, an dem wir ihn und noch weitere Projekte aus unserem MGF-Lab ausstellen.
Dort bin ich auch der MINT-Beauftragte, betreue die Robotik AG und das MGF-Lab, bin Fachbetreuer für Physik und Sammlungsleiter sowie der Strahlenschutzbeauftragte, betreibe die Amateurfunk-Schulstation DK0MGF und führe eine Junior-Ingenieur-Akademie der Deutsche Telekom Stiftung.
- Neues Schuljahr – neues Linux - 19. November 2023
- Mehrfarbdruck ausprobiert - 19. November 2023
- Kulmbacher BRK sagt Danke! - 19. November 2022