Roboter MeArm
Bei unserem Besuch des Arduino Days 2017 im FabLab Bayreuth konnten wir viele Projekte anderer Maker sehen und haben wir viele Inspirationen bekommen. Ein Projekt, das sich aus der Verbindung zweier Ideen ergab, ist der hier vorgestellte Roboterarm.
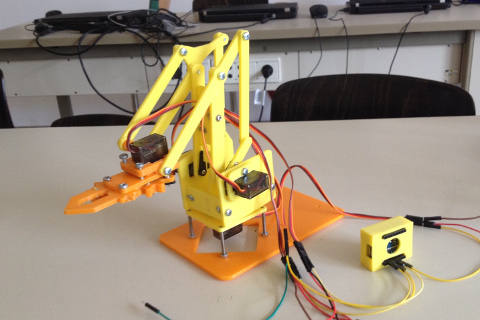
Nachdem wir bereits in unserem Lab einen ersten Roboterarm gebaut haben, waren wir sehr froh, am Arduino Day einen weiteren Typ eines Roboterarms in Aktion erleben zu dürfen. Hierbei handelt es sich um einen MeArm, der kommerziell gekauft oder in der ausgestellten Version selbstgebaut aus lasergecutteten Plexiglasstücken zusammen gesetzt wird.
Da unser Lasercutter leider noch auf sich warten lässt waren wir umso erfreuter, dass es auf thingiverse.com auch mehrere 3D druckbare Versionen des Roboterarms gibt. Wir entschieden uns für eine Umsetzung des Users jonahl, für die es auch passend eine verbesserte Version des Greifers gibt.
Der Ausdruck der benötigten Teile und der Zusammenbau gestalteten sich problemlos. Schön bei diesem Roboterarm ist, dass alle gedruckten Bauteile flach und damit leicht und zügig zu drucken sind und durchgängig auch nur M3 Schrauben verwendet werden.
Die zweite Idee, die in den Roboterarm einfloss, war die Verwendung des Mircocontrollers ESP8266 anstelle eines Arduino. Auf dem Arduino Day wurde unter anderem der FabFarmer vorgestellt, der mit einer Wemos D1 Mini Platine betrieben wird, auf der ein ESP8266 seine Arbeit verrichtet. Die Rechenleistungsfähigkeit des ESP8266 übertrifft die des Arduino bei gleichzeitig deutlich kleinerem Formfaktor und integriertem WLAN, weshalb der Controller gut als Client oder kleiner Webserver eingesetzt werden kann. Auf der Wemos Platine ist außerdem ein Mini-USB Anschluss mit Spannungswandler auf die benötigten 3,3 V verbaut, so dass ganz im Sinne des Umweltschutzes nicht mehr benötigte Handyladenetzteile eine hervorragende Zweitverwendung finden können.
Nachdem unser erster Roboterarm völlig stupide und ungeregelt seiner Sisyphusaufgabe, eine herunter rollende Kugel immer wieder ans obere Ende der Rollbahn zu bringen, nachkommt, benutzen wir die WLAN Fähigkeiten des ESP8266 zur Steuerung unseres MeArm.
Auf dem Microcontroller läuft ein kleiner einfacher Webserver, der über ein eigenes kleines aufgespanntes lokales Netzwerk, browserbasiert von WLAN Clients wie Smartphones oder Tablets Steuerbefehle für den Roboterarm entgegen nimmt, so dass sich der Roboterarm per virtuellem Tastendruck bewegen lässt.
Zunächst wurde ein webinterface gestaltet, bei dem die MG90S Servo-Motoren des Roboterarms über buttons gesteuert werden können. Jeder Klick verändert die entsprechende Servoeinstellung in 5 Grad Schritten.
Die Programmierung des Microcontrollercodes geschah mit Hilfe der Arduino Software. Die benötigten HTML-Seiten wurden in einem Texteditor verfasst. Glücklicherweise kann auf dem ESP8266 ein eigenes Flash-Filesystem (SPIFFS) implementiert werden, so dass der HTML-Code für die Clients nicht erst bei jeder Anfrage im Microcontrollercode erzeugt werden muss, sondern als fertige .html-Dateien abrufbar in diesem Speicherbereich liegt.
Ein verbesserte und benutzerfreundliche Version des Benutzerinterfaces ist durch die Verwendung von slidern geplant.
Dort bin ich auch der MINT-Beauftragte, betreue die Robotik AG und das MGF-Lab, bin Fachbetreuer für Physik und Sammlungsleiter sowie der Strahlenschutzbeauftragte, betreibe die Amateurfunk-Schulstation DK0MGF und führe eine Junior-Ingenieur-Akademie der Deutsche Telekom Stiftung.
- Neues Schuljahr – neues Linux - 19. November 2023
- Mehrfarbdruck ausprobiert - 19. November 2023
- Kulmbacher BRK sagt Danke! - 19. November 2022