Quadrocopter der Dritte
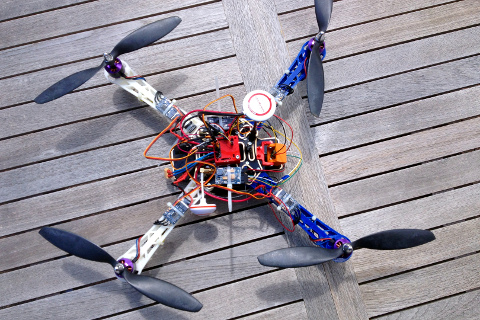
Unser dritter Quadrocopter sollte im Vergleich zu den beiden ersten aus der 250er Klasse (25cm Durchmesser) größer und mit fpv ausgestattet werden. Als Vorlage für unseren kompletten Selbstbau diente ein DJI Flame Wheel F450 mit 45cm Propellerabstand. Da wir in unserem Lab über 3D-Drucker verfügen wurden zunächst die verstärkten Ausleger nach Vorlagen des Users wpmfield aus thingiverse gedruckt. Zwei Carbon Baseplates waren von einem früheren Projekt noch übrig und kamen nun hier zum Einsatz.
Etwas problematisch war zunächst die Verschraubung der Ausleger mit den Plates, da die Bohrungen nicht ganz übereinstimmten. Ein erster Versuch die Einpressmuttern mit dem heißen Lötkolben in die Ausleger einzuschmelzen schlug zunächst fehl, weshalb ein neuer Ausleger gedruckt werden musste. Die Einpressmuttern wurden schließlich mit Sekundenkleber in die aufgebohrten Löcher am Ausleger geklebt.
die Bohrungen nicht ganz übereinstimmten. Ein erster Versuch die Einpressmuttern mit dem heißen Lötkolben in die Ausleger einzuschmelzen schlug zunächst fehl, weshalb ein neuer Ausleger gedruckt werden musste. Die Einpressmuttern wurden schließlich mit Sekundenkleber in die aufgebohrten Löcher am Ausleger geklebt.
Ganz auf eigene Faust und Berechnungen fußend fand diesmal die Wahl der Motoren und 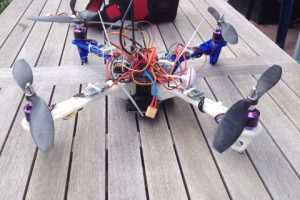 Propeller statt. Die Entscheidung fiel nicht zuletzt des Preises wegen auf SunnySky A2212 980KV aus der Angel Serie. Durch die guten Erfahrungen bei unserem ersten beiden Coptern kommen als Propeller wieder Gemfan, diesman Carbon Nylon 10×3,8 zum Zug. Günstige 20A ESCs fanden sich bei hobbyking in deren Blue Series.
Propeller statt. Die Entscheidung fiel nicht zuletzt des Preises wegen auf SunnySky A2212 980KV aus der Angel Serie. Durch die guten Erfahrungen bei unserem ersten beiden Coptern kommen als Propeller wieder Gemfan, diesman Carbon Nylon 10×3,8 zum Zug. Günstige 20A ESCs fanden sich bei hobbyking in deren Blue Series.
Der Flightcontroller ist nach den guten Erfahrungen beim Copter II wieder ein Exemplar der Firma Seriously Pro Racing. Diesmal der Nachfolger des damals eingesetzten F3, ein F3EVO. Im Vergleich zu seinem Vorgänger hat der EVO den Vorteil eine SD-Karte zum loggen der Flugdaten einzusetzen und er lässt sich wunderbar auf das Seriously Pro Racing OSD/PDB Board stecken. Damit entfällt die Notwendigkeit eines externen BEC, die ESCs / Motoren werden von der Platine versorgt und unser fpv bekommt auch gleich noch ein On-Screen-Display mitgeliefert.
Damit der Flightcontroller Stack auch gut befestigt werden kann wurde in mehreren 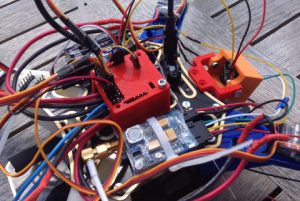 Designstufen ein passendes Gehäuse entworfen, gedruckt und auf thingiverse veröffentlicht. Grundlage hierfür war der Entwurf des Nutzers wifapaj, der dankenswerterweise auf Nachfrage per email unverzüglich antwortete und die genauen Maße seines Designs mitteilte. So konnte unser Gehäuse viel einfacher entwickelt werden.
Designstufen ein passendes Gehäuse entworfen, gedruckt und auf thingiverse veröffentlicht. Grundlage hierfür war der Entwurf des Nutzers wifapaj, der dankenswerterweise auf Nachfrage per email unverzüglich antwortete und die genauen Maße seines Designs mitteilte. So konnte unser Gehäuse viel einfacher entwickelt werden.
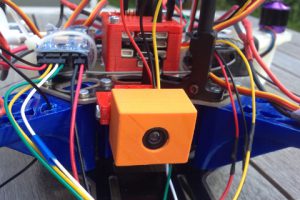 Dieser Copter wurde von uns erstmals mit einer Kamera ausgestattet. Eingebaut in ein selbst gedrucktes Gehäuse wurd
Dieser Copter wurde von uns erstmals mit einer Kamera ausgestattet. Eingebaut in ein selbst gedrucktes Gehäuse wurd e eine kleine CMOS Kamera TVL600 wie man sie von Racecoptern kennt. Das aufgenommene Bild wird über eine passenden Sender-Empfänger Kombination an unsere Selbstbau fpv-Brille Quanum V2 Pro gesendet. Die mitgelieferten Stabantennen von Sender und Empfänger wurden durch zirkular polarisierende Cloverleaf Antennen ersetzt.
e eine kleine CMOS Kamera TVL600 wie man sie von Racecoptern kennt. Das aufgenommene Bild wird über eine passenden Sender-Empfänger Kombination an unsere Selbstbau fpv-Brille Quanum V2 Pro gesendet. Die mitgelieferten Stabantennen von Sender und Empfänger wurden durch zirkular polarisierende Cloverleaf Antennen ersetzt.
Zu guter Letzt hat unser Copter auch noch ein GPS bekommen: ein Ublox Mini Neo M8N sorgt für die Ermittlung der Position. Inwieweit Position Hold 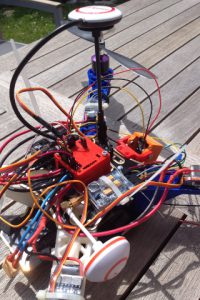 und RTH in der für den Flightcontroller eingesetzten Software Cleanflight inzwischen verlässlich funktionieren werden die ersten Tests zeigen.
und RTH in der für den Flightcontroller eingesetzten Software Cleanflight inzwischen verlässlich funktionieren werden die ersten Tests zeigen.
Sehr angenehm und arbeitsvereinfachend ist der BLHeli Configurator. Damit lässt sich die BLHeli Software komfortabel per USB über den Flightcontroller auf die ESCs flashen.
Nachdem die letzten Fehler im Aufbau nun ausgemerzt wurden hat unser Copter heute seinen ersten vorsichtigen Testflug absolviert. Die Bildübertragung funktionietr einwandfrei. Nun geht es an das Einstellen der PID-Werte um den Copter unseren Bedürfnissen gemäß steuern zu können.
Dort bin ich auch der MINT-Beauftragte, betreue die Robotik AG und das MGF-Lab, bin Fachbetreuer für Physik und Sammlungsleiter sowie der Strahlenschutzbeauftragte, betreibe die Amateurfunk-Schulstation DK0MGF und führe eine Junior-Ingenieur-Akademie der Deutsche Telekom Stiftung.
- Neues Schuljahr – neues Linux - 19. November 2023
- Mehrfarbdruck ausprobiert - 19. November 2023
- Kulmbacher BRK sagt Danke! - 19. November 2022