Quadrocopter – der Zweite
Der Bau des Nachfolgemodells zu unserem Bolzcopter ließ nicht lange auf sich warten. Da sich das Design als sehr gelungen herausgestellt hatte, wurde in der zweiten Version das Augenmerk auf neuere Hardwarekomponenten gelegt.
So wurde die betagte MultiWii mit ihrem 8-bit Prozessor durch eine SPRacingF3 Flugsteuerung mit 32-bit Architektur ersetzt. Dieser Flghtcontroller bietet neben stark verbesserten Sensoren (Gyroskop, Beschleunigungsmesser, Barometer und Magnetometer) deutlich mehr Speicherplatz für eine umfangreichere Softwareausstattung und sogar noch Speicher für das Protokollieren von Flugdaten.
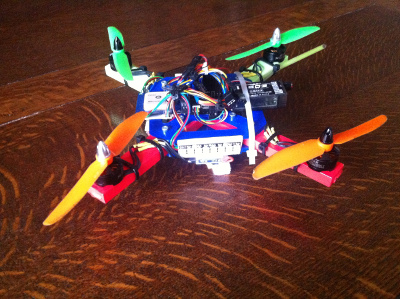
Softwareseitig kommt das Programm Cleanflight zum Einsatz. Damit ist nicht nur die Berechnung des aktuellen Flugzustandes des Copters deutlich schneller und effizienter, es lassen sich auch Sensordaten wie GPS, Akkuladezustand oder aktueller Stromverbrauch auslesen und abspeichern. Ebenso ist eine schöne Möglichkeit integriert, programmierbare Dreifarben-LEDs anzusprechen. Somit verfügt unser zweites Modell über Fahrtrichtungsanzeiger, Bug- und Heckbeleuchtung in weiß bzw. rot, Akkuladestands-Warnanzeige (rot blinkend), Flugzustandskontrollleuchten und eine LED zur Anzeige der GPS-Empfangsqualität.
Den Rahmen, die Ausleger und die Motoren haben wir im Vergleich zum Vorgänger unverändert gelassen. Bei den elektronischen Geschwindigkeitsreglern (ESCs) haben wir uns für 12A Exemplare der Blue Series der Firma Hobbyking entschieden. Da hier zunächst deren eigene Firmware eingespielt war, mit der wir nicht so richtig warm wurden, haben wir kurzerhand die neueste BLHeli Firmware auf die ESCs geflasht. Als Empfänger kommt bei diesem Modell ein S603 der Firma Storm im PPM-Modus zum Einsatz.
Dank der verbesserten Hardware fliegt dieser Copter sehr ruhig und ist dabei auf Wunsch trotzdem sehr agil. Die Steigrate des Copters mit 0503-Propellern liegt bei einem Abfluggewicht von rund 500 Gramm in etwa bei der einer Silvesterrakete.
Das GPS ist angeschlossen und liefert verlässlich Daten. Die nächsten Schritte werden die Implementierung von Flugzuständen mit Halten der Position (PosHold) und Heimkehrfunktion sein (RTH).
Dort bin ich auch der MINT-Beauftragte, betreue die Robotik AG und das MGF-Lab, bin Fachbetreuer für Physik und Sammlungsleiter sowie der Strahlenschutzbeauftragte, betreibe die Amateurfunk-Schulstation DK0MGF und führe eine Junior-Ingenieur-Akademie der Deutsche Telekom Stiftung.
- Neues Schuljahr – neues Linux - 19. November 2023
- Mehrfarbdruck ausprobiert - 19. November 2023
- Kulmbacher BRK sagt Danke! - 19. November 2022