Die Quadrocopter sind los
Nachdem an unserer Schule seit einiger Zeit eine DJI Phantom für professionelle Bilder aus der Luft sorgt, haben wir begonnen unsere eigenen Multicopter zu bauen.
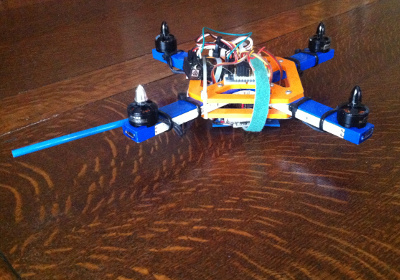
Angefangen haben wir mit einem kleinen Bolzkopter aus der 250mm Klasse. Der Rahmen ist auf unseren Ultimakern+ selbstgedruckt, die mit Schrumpfschlauch überzogenen Ausleger sind aus Fichtenholz.
Als Flightcontroller kommt eine MultiWii zum Einsatz, die vier 1806 Motoren stammen von Emax und die ESCs mit SimonK Firmware von Bulltec.
Für die nötige Energie sorgt ein 2200mAh 3S-LiPo Akku. Damit man im Flug auch erkennt ob der Copter gerade auf einen zufliegt oder von einem weg befindet sich hinten ein kleines LED Band mit zehn weißen LEDs.
Beim Empfänger handelt es sich um einen einfachen Spektrum 6-Kanal Empfänger, der im PWM-Modus arbeitet.
Zwischenzeitlich wurde auch der Anschluss eines GPS-Empfängers probiert, nachdem der Speicher der MultiWii aber sehr knapp ist und der Copter auf Grund dessen auch schon einen Absturz hinter sich hat, wurde das GPS wieder ausgebaut und in den Nachfolgecopter eingebaut.
Der kleine blaue Flitzer fliegt bereits sehr gut und für seine alte Hardwareausstattung auch schon recht ruhig. Die eingestellten PID-Werte können aber noch ein wenig Feintuning vertragen.
Dort bin ich auch der MINT-Beauftragte, betreue die Robotik AG und das MGF-Lab, bin Fachbetreuer für Physik und Sammlungsleiter sowie der Strahlenschutzbeauftragte, betreibe die Amateurfunk-Schulstation DK0MGF und führe eine Junior-Ingenieur-Akademie der Deutsche Telekom Stiftung.
- Neues Schuljahr – neues Linux - 19. November 2023
- Mehrfarbdruck ausprobiert - 19. November 2023
- Kulmbacher BRK sagt Danke! - 19. November 2022