Roboter MeArm II
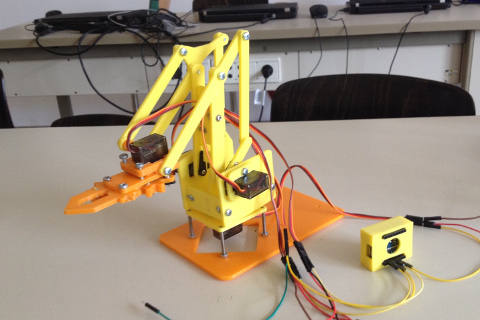
Nachdem unser MeArm sich inzwischen wie gewünscht per Tastendruck auf einem Tablet oder Smartphone steuern lässt haben wir uns an die Verbesserung der Bedienerfreundlichkeit gemacht. Der Hauptnachteil der zunächst gewählten Realisierung der Steuerung über buttons ist die sich ergebende Gemächlichkeit der Roboterbewegung, da für jeden Tastendruck ein http-request an den Webserver geschickt wird, den dieser dann auswertet und in eine 5 Grad Servobewegung umsetzt. Außerdem ist das wiederholte Betätigen der Buttons ermüdend. Deswegen wurde zunächst die Bedienung über slider umgesetzt.