Cubebot I – Design
Wenn man über alternative Fortbewegungsmöglichkeiten für Roboter nachdenkt, kommt man auf komische Ideen. Zum Beispiel diese, dass man einen Würfel in drei Winkel aus jeweils zwei Würfelseiten zerlegen könnte. Wenn man diese drei Winkel jetzt noch beweglich an einem inneren Rahmen befestigen und über Servos ansteuern würde, könnte sich ein auf dem Boden liegender Roboter durch Öffnen und Schließen der Klappen fortbewegen.
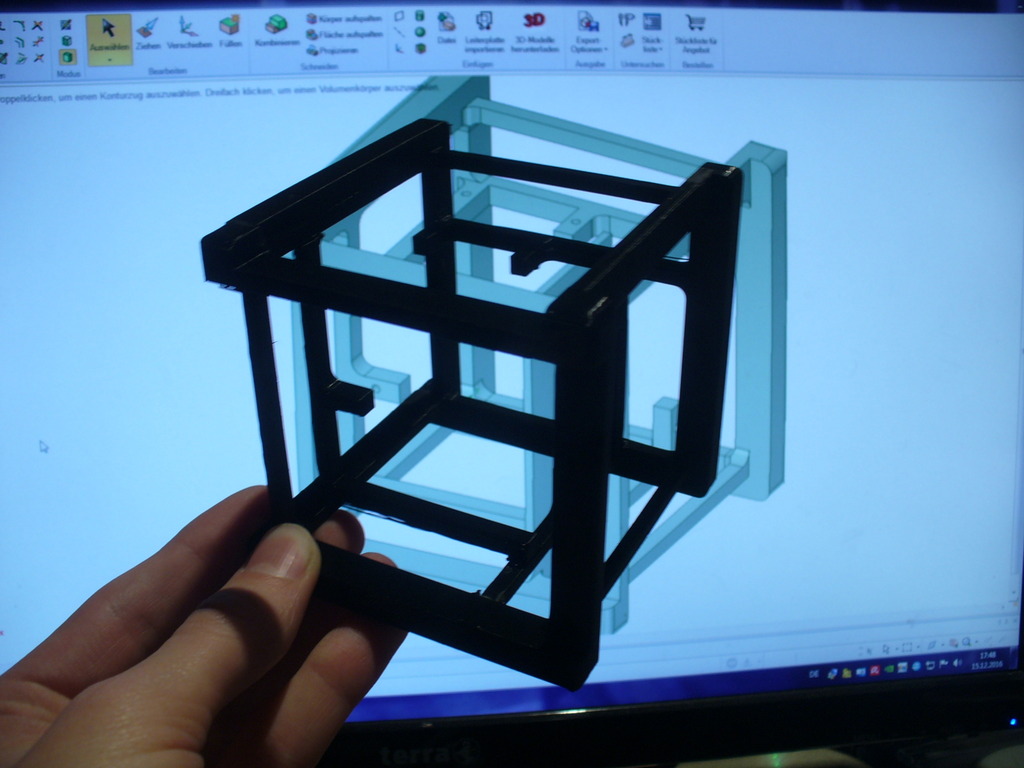
Solche Ideen vergisst man in der Regel schnell wieder. Wenn man aber noch eine 3-Kanal Fernsteuerung und im MGF-Lab Zugang zu einem 3D-Drucker hat, sitzt man im Nu vor dem Rechner und arbeitet das Ganze aus. Tatsächlich war das dann ziemlich kompliziert und es wurden einige Handskizzen und Pappe-Modelle zur Visualisierung gebraucht. Auch das anschließende 3D-Modellieren am Rechner stellte sich als ziemlich aufwendig und „mind-bending“, wie der Engländer sagen würde, heraus.
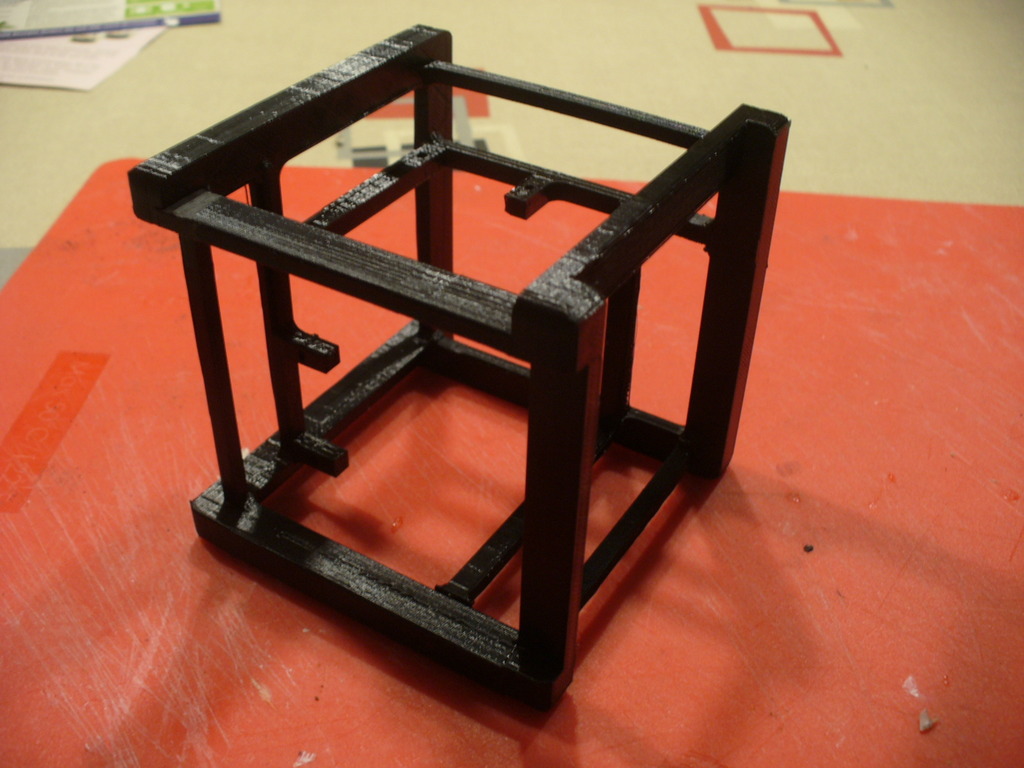
 Zur vermeintlich besseren Druckbarkeit wurde das gesamte 3D-Modell in mehrere Teile zerlegt, gedruckt und der Ausdruck anschließend zusammengeklebt. Der verwendete Sekundenkleber entfärbte allerdings das PLA, und als dann auch noch ein Loch nicht richtig positioniert, wurde das ganze Modell kurzerhand noch einmal und in einem Stück gedruckt.
Zur vermeintlich besseren Druckbarkeit wurde das gesamte 3D-Modell in mehrere Teile zerlegt, gedruckt und der Ausdruck anschließend zusammengeklebt. Der verwendete Sekundenkleber entfärbte allerdings das PLA, und als dann auch noch ein Loch nicht richtig positioniert, wurde das ganze Modell kurzerhand noch einmal und in einem Stück gedruckt.
Um zu verhindern, dass die Seite des Würfels, die auf dem Druckbett zu Liegen kommt, glatt und spiegelnd ist, der Rest aber nicht, wurde erstmalig das Ultimaker-Glasbett mit blauem 3M-Tape abgeklebt.
 In Teil 2 des Projektberichts wird es mit dem Zusammenbau der Komponenten weiter gehen wobei die Funktionsweise des Roboters noch klarer werden sollte.
In Teil 2 des Projektberichts wird es mit dem Zusammenbau der Komponenten weiter gehen wobei die Funktionsweise des Roboters noch klarer werden sollte.
Dort bin ich auch der MINT-Beauftragte, betreue die Robotik AG und das MGF-Lab, bin Fachbetreuer für Physik und Sammlungsleiter sowie der Strahlenschutzbeauftragte, betreibe die Amateurfunk-Schulstation DK0MGF und führe eine Junior-Ingenieur-Akademie der Deutsche Telekom Stiftung.
- Neues Schuljahr – neues Linux - 19. November 2023
- Mehrfarbdruck ausprobiert - 19. November 2023
- Kulmbacher BRK sagt Danke! - 19. November 2022