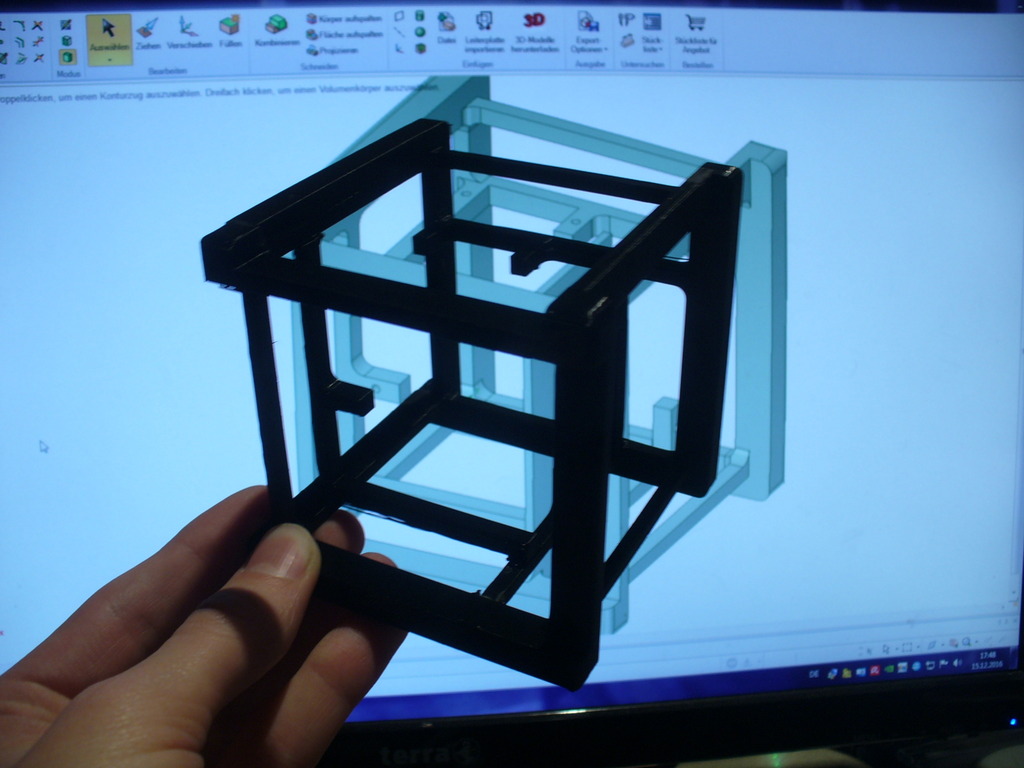
Cubebot I – Design
Wenn man über alternative Fortbewegungsmöglichkeiten für Roboter nachdenkt, kommt man auf komische Ideen. Zum Beispiel diese, dass man einen Würfel in drei Winkel aus jeweils zwei Würfelseiten zerlegen könnte. Wenn man diese drei Winkel jetzt noch beweglich an einem inneren Rahmen befestigen und über Servos ansteuern würde, könnte sich ein auf dem Boden liegender Roboter durch Öffnen und Schließen der Klappen fortbewegen.
